
1. 원형 편직기 기술 소개
1. 원형 편직기 간략 소개
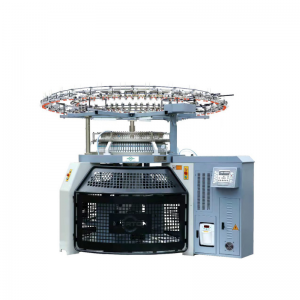
원형 편직기(그림 1 참조)는 면사를 원통형 직물로 짜는 장치입니다. 주로 다양한 종류의 기모 원단, 티셔츠 원단, 구멍이 있는 다양한 무늬 원단 등을 편직하는 데 사용됩니다. 구조에 따라 싱글 저지 원형 편직기와 더블 저지 원형 편직기로 나뉘며, 섬유 산업에서 널리 사용됩니다.
 2. 프로세스 요구사항
2. 프로세스 요구사항
(1) 현장 작업 환경의 온도가 비교적 높기 때문에 인버터는 강력한 환경 저항성을 가져야 하며, 솜은 냉각 팬을 쉽게 멈추게 하고 손상시키며 냉각 구멍을 막히게 할 수 있습니다.
(2) 유연한 인칭 작동 기능이 필요합니다. 인칭 버튼이 장비의 여러 곳에 설치되어 있고 인버터가 빠르게 반응해야 합니다.
(3) 속도 제어에는 세 가지 속도가 필요합니다. 하나는 일반적으로 약 6Hz인 인칭 작동 속도이고, 다른 하나는 최대 70Hz의 주파수를 갖는 정상 직조 속도이며, 세 번째는 약 20Hz의 주파수가 필요한 저속 집속 작동 속도입니다.
(4) 원형 편직기 작동 중에는 모터의 역회전 및 회전이 절대적으로 금지되어 있습니다. 그렇지 않으면 바늘판의 바늘이 휘거나 부러질 수 있습니다. 원형 편직기가 단상 베어링을 사용하는 경우에는 이 사항이 고려되지 않습니다. 시스템이 정회전 및 역회전하는 경우, 이는 전적으로 모터의 정회전 및 역회전에 달려 있습니다. 한편으로는 역회전을 금지할 수 있어야 하고, 다른 한편으로는 회전을 제거하기 위해 DC 브레이크를 설치해야 합니다.
3. 성능 요구사항
직조 작업 시 하중이 무겁고, 미세 조정/시작 과정이 신속해야 하므로 인버터는 저주파, 큰 토크 및 빠른 응답 속도를 갖춰야 합니다. 주파수 변환기는 벡터 제어 모드를 채택하여 모터의 속도 안정화 정확도와 저주파 토크 출력을 향상시킵니다.
4. 제어 배선
원형 편직기의 제어부는 마이크로컨트롤러 또는 PLC와 인간-기계 인터페이스(HMI)를 결합하여 제어합니다. 주파수 변환기는 단말기를 통해 시작 및 정지가 제어되며, 주파수는 아날로그 신호 또는 다단계 주파수 설정으로 제공됩니다.
다단 속도 제어에는 기본적으로 두 가지 제어 방식이 있습니다. 하나는 아날로그 신호를 이용하여 주파수를 설정하는 방식입니다. 조깅 모드, 고속/저속 모드 등 모든 모드에서 제어 시스템은 아날로그 신호와 작동 지시를 제공합니다. 다른 하나는 주파수 변환기를 사용하는 방식입니다. 내장된 다단 주파수 설정 기능을 통해 제어 시스템은 다단 주파수 전환 신호를 제공하며, 조깅 모드는 인버터 자체에서 제공하고, 고속 주행 주파수는 인버터의 아날로그 신호 또는 디지털 설정값을 통해 제어합니다.
2. 현장 요구사항 및 시운전 계획
(1) 현장 요구사항
원형 편직기 산업에서 인버터의 제어 기능에 대한 요구 사항은 비교적 간단합니다. 일반적으로 단자에 연결하여 시동 및 정지를 제어하고, 아날로그 주파수를 입력하거나 다단 속도 제어를 통해 주파수를 설정합니다. 인칭 또는 저속 운전 시에는 빠른 속도가 요구되므로, 인버터는 저주파에서 큰 저주파 토크를 발생시키도록 모터를 제어해야 합니다. 일반적으로 원형 편직기에는 주파수 변환기의 V/F 모드가 충분합니다.
(2) 디버깅 방식 본 논문에서 채택한 방식은 다음과 같습니다: C320 시리즈 센서리스 전류 벡터 인버터, 출력: 3.7kW 및 5.5kW
3. 디버깅 매개변수 및 지침
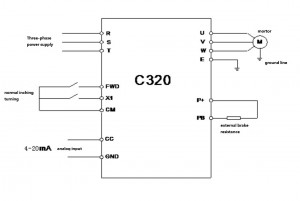
1. 배선도
2. 디버그 매개변수 설정
(1) F0.0=0 VF 모드
(2) F0.1=6 주파수 입력 채널 외부 전류 신호
(3) F0.4=0001 외부 단자 제어
(4) F0.6=0010 역회전 방지는 유효합니다.
(5) F0.10=5 가속 시간 5S
(6) F0.11=0.8 감속 시간 0.8S
(7) F0.16=6 캐리어 주파수 6K
(8) F1.1=4 토크 부스트 4
(9) F3.0=6 X1을 전방 조그로 설정
(10) F4.10=6 조그 주파수를 6Hz로 설정합니다.
(11) F4.21=3.5 조그 가속 시간을 3.5초로 설정합니다.
(12) F4.22=1.5는 조그 감속 시간을 1.5초로 설정합니다.
디버깅 참고 사항
(1) 먼저, 조깅을 하여 모터의 방향을 결정합니다.
(2) 조깅 중 진동 및 느린 반응 문제에 관하여 조깅의 가속 및 감속 시간은 요구 사항에 따라 조정되어야 합니다.
(3) 저주파 토크는 캐리어파와 토크 부스트를 조정하여 개선할 수 있습니다.
(4) 솜뭉치가 공기 덕트를 막아 팬이 멈추게 되어 인버터의 열 방출이 제대로 되지 않습니다. 이러한 상황이 자주 발생합니다. 현재 일반적인 인버터는 열 경보를 건너뛰고 공기 덕트에서 보푸라기를 수동으로 제거한 후 계속 사용합니다.
게시 시간: 2023년 9월 8일